
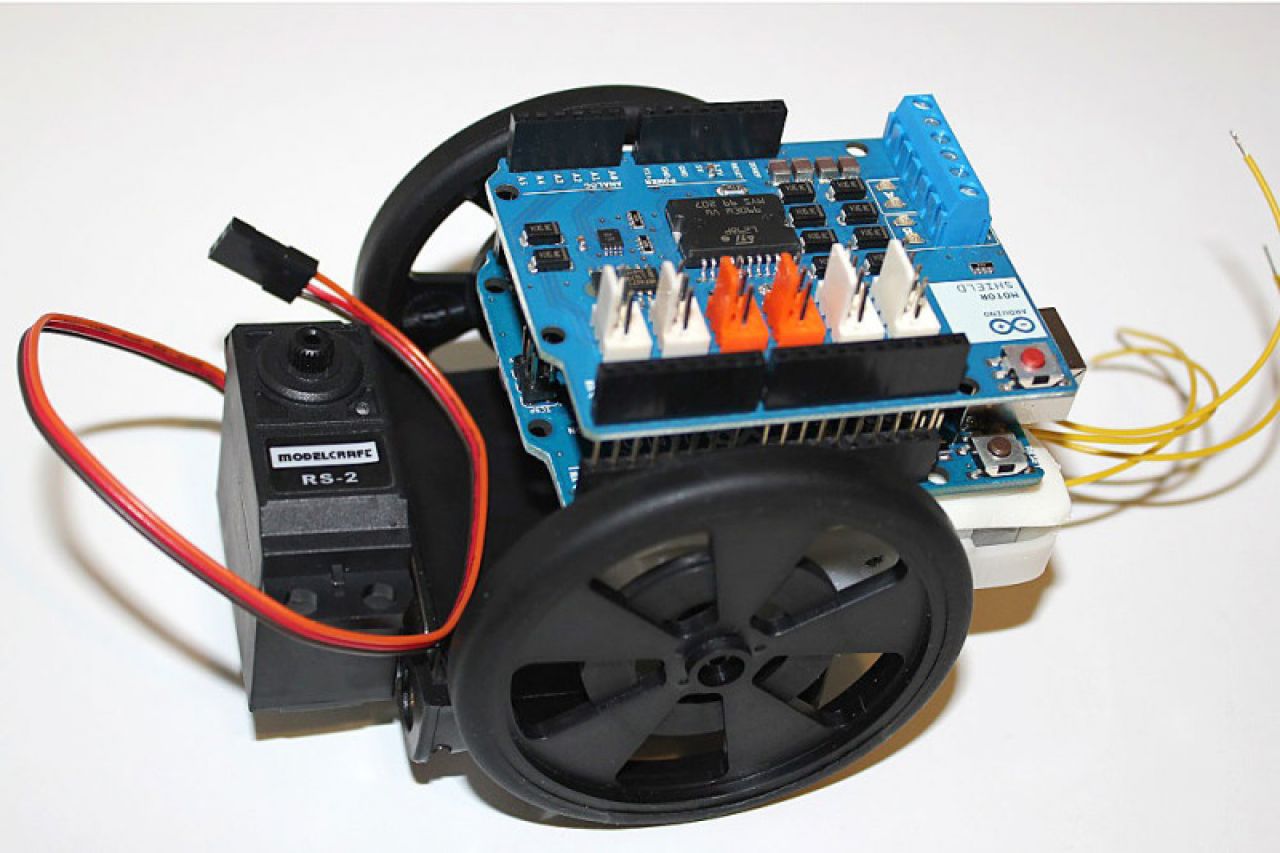
Diese Baueinleitung zeigt euch, wie man ganz einfach und schnell einen eigenen kleinen elektronischen Roboter zusammenbasteln kann. Nebenbei wirst du viele nützliche Sachen lernen, die dich beim Bau deines nächsten Roboters begleiten werden. Die Bauanleitung wurde so ausgelegt, dass du schnell deinen ersten Erfolg erzielen kannst, denn gerade als Einsteiger möchte man möglichst schnell Ergebnisse sehen. Und hiermit wird Dein erstes Ergebnis ein programmierbarer Roboter, basierend auf einem Arduino Board!
Einfacher Aufbau
Die einzelnen Teile werden zwar mit doppelseitigem Klebeband befestigt, dies erspart aber die Konstruktion oder den Kauf eines Chassis.
Der Vorteil ist, dass man das schnell wieder auseinander nehmen und die Sachen für andere Projekte verwenden kann. Wenn dir die Form des Roboters doch gefällt, kannst du die Motoren und Servo mit Hilfe von Heißkleber am Batteriehalter befestigen. Man kann dann immer noch alles auseinander reißen (mit etwas mehr Mühe)
Nachteil: natürlich ist der Aufbau mit Heißkleber oder Klebeband nicht so elegant, wie mit Schrauben und Muttern und evtl. noch Kunststoffplatten. Aber die Lösung ist günstig und für den Einstieg praktikabel.
Die notwendigen Teile für unseren Arduino™ Roboter
Es werden eigentlich nur gängige Bauteile und Komponenten verwendet. Am Ende des Artikels nennen wir einige Bezugsquellen, wo die notwendigen Teile beispielsweise erhältlich sind. Vielleicht habt ihr aber auch schon das ein oder andere Teil Zuhause rumliegen.
Hier ist eine kurze Aufzählung der Bauteile, die du für den Aufbau deines eigenen Roboters benötigst.
Arduino UNO Rev. 3 ™
Arduino ist eine Entwicklungsplattform, bestehend aus Software und Hardware. Die Plattform wurde extra dafür entwickelt, ohne einer langen Lernphase, direkt in die Welt der Mikrocontroller-Projekte einzusteigen. Im Prinzip wurde Arduino für Einsteiger entwickelt. Natürlich können auch 100% Arduino kompatible Boards verwendet werden.
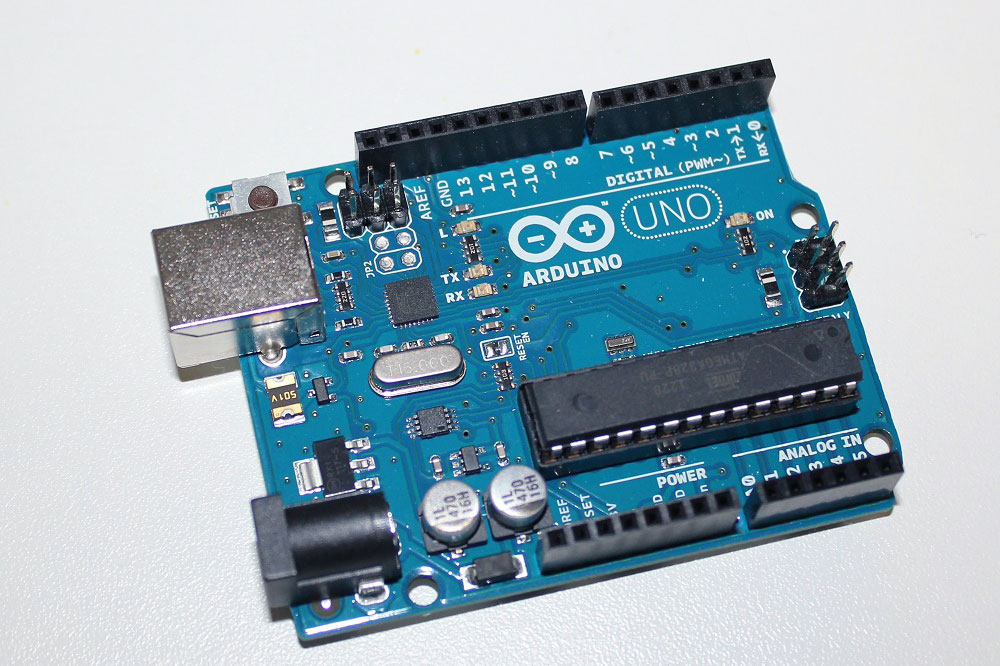
Arduino UNO Rev. 3
Arduino Motor Shield
Motor Shield ist eine wichtige Erweiterung für den Arduino. Da der Arduino nicht in der Lage ist, genug Strom von den Batterien zu den Motoren umzuleiten, übernimmt das der L298 Treiber auf dem Motor Shield, der von Arduino gesteuert wird. Außerdem bietet das Motor Shield weitere Anschlüsse für Sensoren und Aktoren. Diese Anschlüsse sind auch mit dem TinkerKit kompatibel.
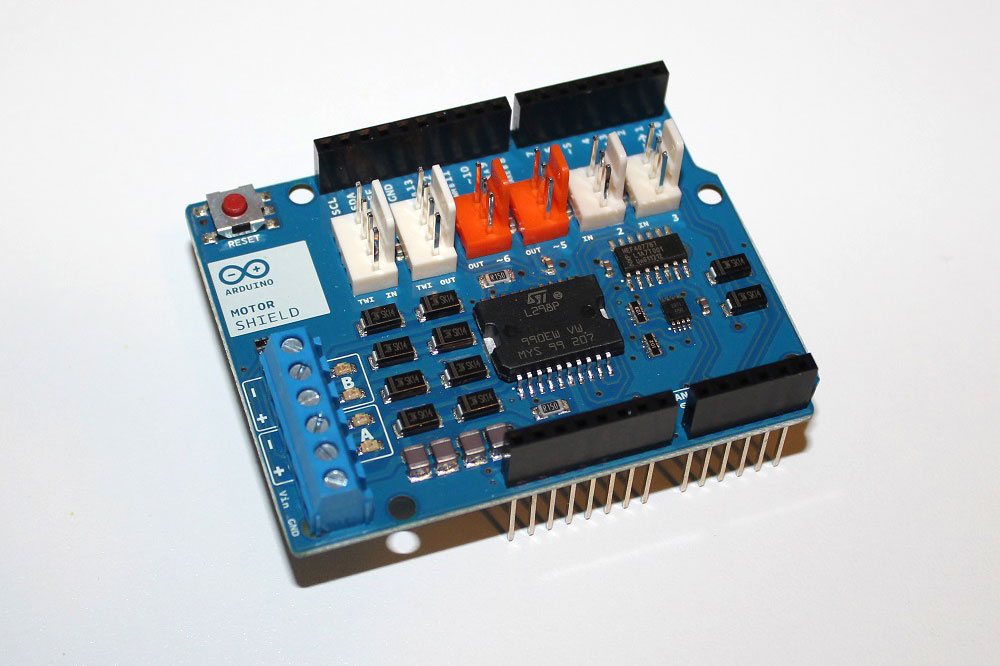
Arduino Motor Shield
- 5 Stück oder mehr 100mm Female-Female (FF) Jumper Wires
Diese kleine Leitungen ersparen einem einige Lötarbeiten und erhöhen die Flexibilität beim Aufbau. - Etwas Draht
Der Draht muss ca. 0,25mm² Querschnitt haben und ein ca. 20-30cm langes Stück reicht hier vollkommen aus. - Einen Batterieclip
Hier muss man wohl nicht viel erzählen. Ist eben dazu da, um die Batterien mit der Elektronik zu verbinden.
-
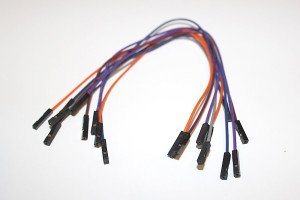
- 100mm Female-Female (FF) Jumper Wires
-

- Etwas Draht
-

- Batterieclip
-

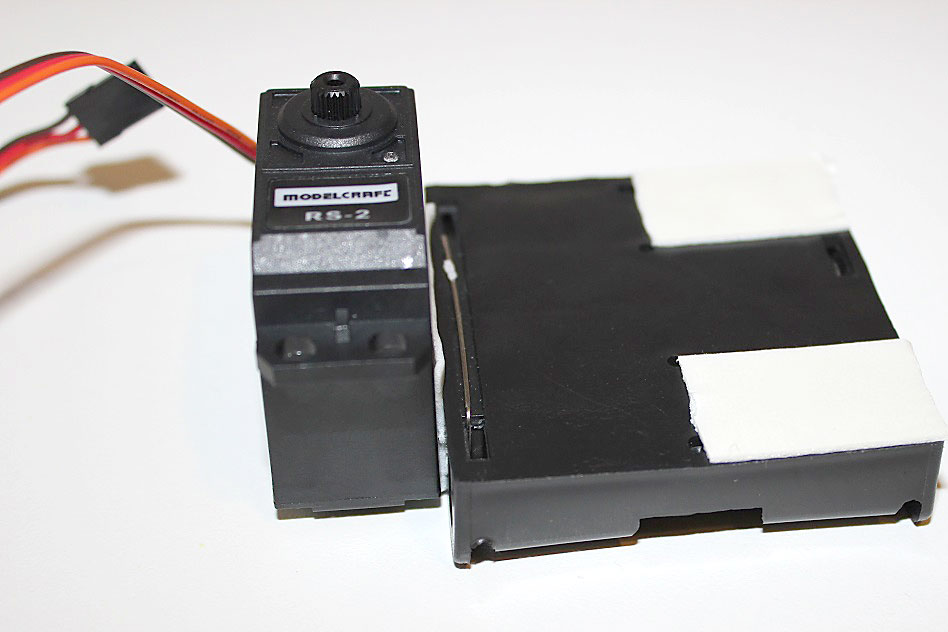
Modellbau Servo
Einen Standard Modellbau Servo
Servomotoren sind in der Robotik sehr verbreitet. Im Inneren des Servos befindet sich ein kleiner Motor, mehrere Zahnräder und etwas „schlaue“ Elektronik. Ein Servo besitzt drei Anschlüsse für Plus, Minus und Signal. Über die Signalleitung sendet der Mikrocontroller (in unserem Fall Arduino) ein Signal zum Servo. Dadurch „weiß“ der Servo, in welche Richtung er drehen und an welcher Stelle er anhalten soll. Diese Stelle liegt meistens zwischen 0° und 180°.
-

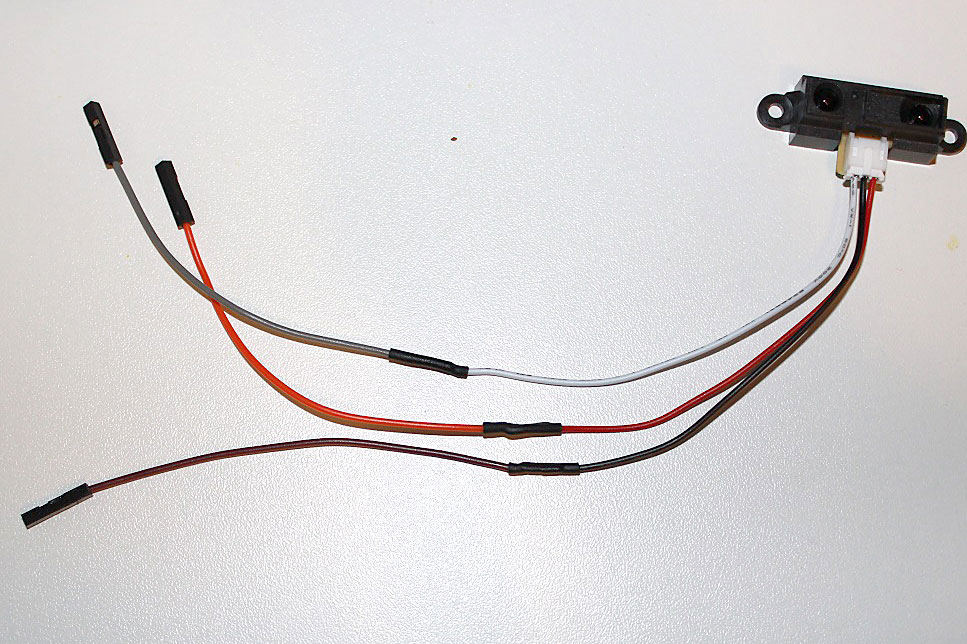
Sharp Infrarot Entfernungssensor
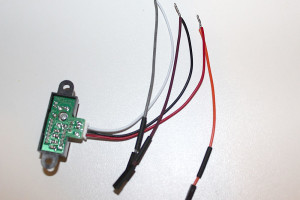
Sharp Infrarot Entfernungssensor
Der Distanzmesser besitzt drei Anschlussdrähte und so zu sagen „zwei Augen“. Ein Auge erzeugt einen Lichtstrahl, der für menschliche Augen nicht sichtbar ist. Also wundert euch nicht, wenn der Sensor nicht leuchtet. Das ist schon richtig so =). Sollte vor diesem Strahl ein Gegenstand auftauchen, wird dieses Licht zurück reflektiert und von dem „zweiten Auge“ des Sensors erkannt. In diesem Augenblick, wo das Hindernis von dem Sensor erkannt wurde, steigt die Spannung an der Signalleitung des Sensors und zwar je näher das Hindernis, desto höher die Spannung an der Signalleitung. Der Mikrocontroller kann dieses Signal auswerten und den Roboter ausweichen lassen. Achtet bitte darauf, dass der Sensor entweder mit Anschlusskabel (siehe auf dem Bild) geliefert wird oder bestellt diesen mit. -

Batteriehalter
Batteriehalter für 4 AA Batterien (1,5Volt)
Die 4 Batterien hintereinander angeschlossen, erzeugen insgesamt 6 Volt, die in die Steckerbuchse des Arduinos gehen. Auf dem Board ist ein Spannungsregler, der die 6Volt in 5Volt umwandelt. 5Volt ist quasi die Standardspannung, mit der fast die gesamte Elektronik des Roboters arbeitet.


-

Mignon Batterien
AA 1,5Volt Batterien (Typ Mignon)
Aus den Batterien wird der Roboter mit Strom versorgt. Diese Batterien sind fast in jedem Laden erhältlich und sind relativ günstig.

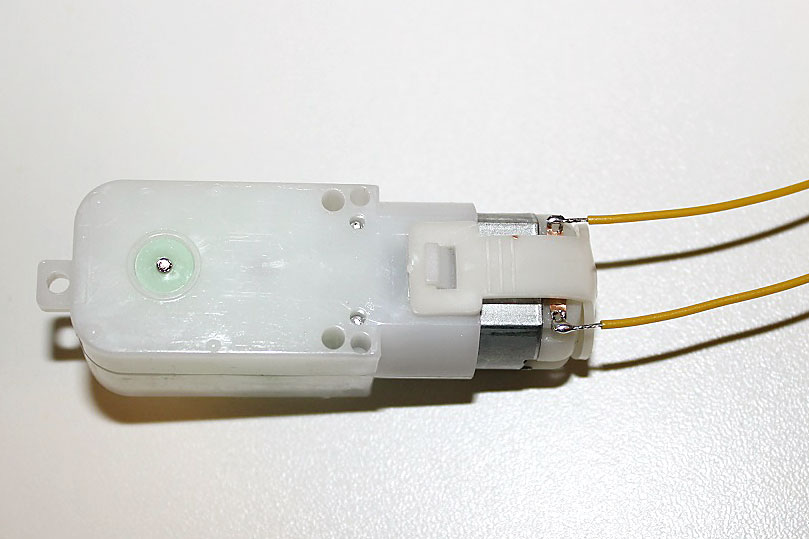
- Zwei Mini-Getriebemotoren und zwei Räder
Das Getriebe des Getriebemotors besteht aus mehreren Zahnrädern, die die Drehzahl der Räder zwar reduzieren (Untersetzung), verleihen ihnen aber mehr Kraft (Drehmoment). Dadurch kann der Roboter auch leichte Neigungen hoch fahren und rollt nicht zurück.
-

- Räder
-

- Mini-Getriebemotoren
- Eine Rolle doppelseitiges Klebeband
Dieses Band ist eine gute Methode zwei kleine Gegenstände miteinander zu verkleben und ist in unserem Fall eine gute Alternative zum Sekundenkleber etc.. Falls du deinen Roboter modifizieren/umbauen möchtest, geht es viel leichter alles auseinander zu nehmen, als wenn es geklebt wäre. - Etwas Schrumpfschlauch (3-5mm Durchmesser)
Während des Aufbaus deines Roboters, müssen einige Leitungen miteinander verlötet werden, z.B. die Anschlüsse des Sharp Sensors. Damit diese Leitungen keinen Kurzschluss verursachen, sollten sie mit Hilfe von Schrumpfschlauch (oder Klebeband) isoliert werden. Wichtig ist, dass du den Schrumpfschlauch vor dem Verlöten auf die Leitungen drauf machst. Wenn man den Schrumpfschlauch erwärmt, schrumpft dieser zusammen. - Werkzeug
Ein Feuerzeug um Schrumpfschlauch zu erwärmen, Seitenschneider um Drähte und doppelseitiges Klebeband abzuschneiden, kleinen Schlitz-Schraubendreher (2-3mm breit) und eine Abisolierzange um die Drahtenden von der Isolation zu befreien. - Lötkolben und Lötzinn
Während des Aufbaus muss man einige Leitungen miteinander verlöten. Dazu braucht man Lötzinn und einen Lötkolben um den zum Schmelzen zu bringen. - Einen Computer mit Internetverbindung und einem freien USB-Anschluss
Der Programm-Code für den Roboter wird mit Hilfe von USB-Kabel auf den Mikrocontroller übertragen. Die Arduino Programmierumgebung ist kostenlos und läuft unter Mac OS, Linux und Windows.
-

- Klebeband
-

- Schrumpfschlauch
-

- Werkzeug
-

- Lötstation
Schritt für Schritt Bauanleitung
Hast du alles? Dann auf geht’s!!!
Schritt 1
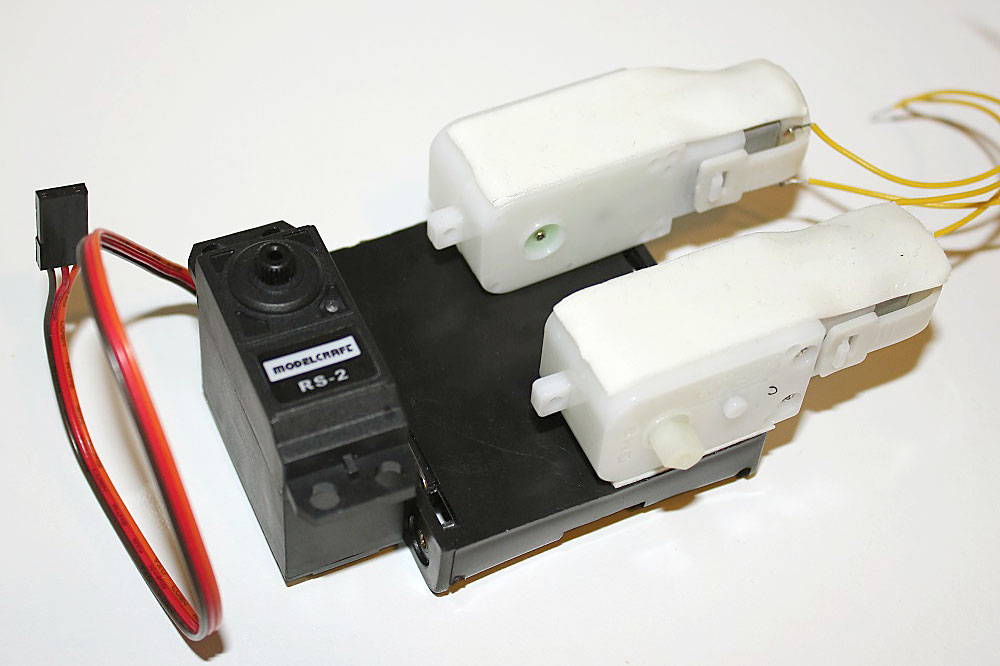
Ca. 4cm langes Stück doppelseitiges Klebeband abschneiden und auf einer Seite die Schutzfolie abziehen. Jetzt das Band mit der klebrigen Seite am Batteriehalter anbringen und drücke es mit etwas Kraft zusammen.

Schritt 2
Jetzt entferne die andere Schutzfolie und klebe den Servo drauf und drücke das Ganze mit etwas Kraft zusammen.

Schritt 3
Schneide dir zwei 3 cm lange Stücke des Klebebandes ab und klebe sie auf den hinteren Bereich des Batteriehalters drauf.
Schritt 4
Schneide dir 5 cm lange Stücke von dem Draht ab (4 Stück) und entferne mit Hilfe der Abisolierzange jeweils ca. 5mm der Isolierung ab.

Schritt 5
Die GM9 Motoren haben jeweils zwei Anschlüsse. Je nach dem an welchem Anschluss Plus oder Minus angeschlossen wird, kann der Motor entweder in die eine oder andere Richtung drehen. Löte an jeden der Anschlüsse jeweils eine Leitung an, die du in Schritt 4 vorbereitet hast. Achte dabei darauf, dass die Lötspitze die Kunststoffteile der Motoren nicht berührt. Achte auch darauf, dass es keine Lötverbindungen zwischen Anschlüssen und dem metallischen Gehäuse des Motors gibt.
Schritt 6
Jetzt werden die Motoren auf den Batteriehalter geklebt. Greife jetzt noch mal zum doppelseitigen Klebeband und klebe es auf die Motoren oben drauf so dass auch die Metallfläche bedeckt ist.
Schritt 7
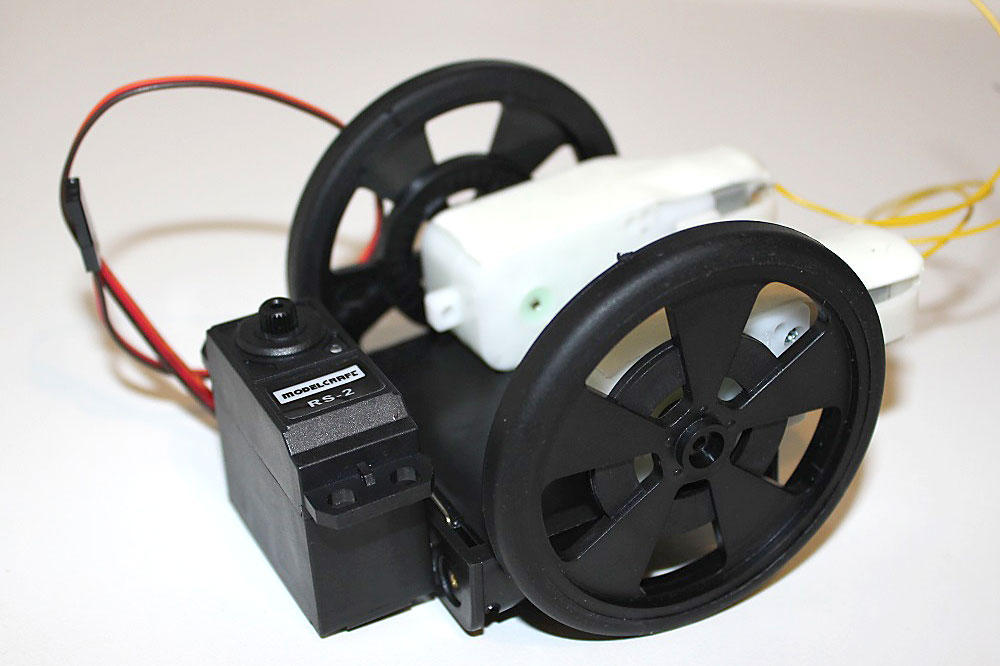
Jetzt werden die Räder auf die Motorachsen montiert.
So langsam sieht es nach was aus, nicht wahr?
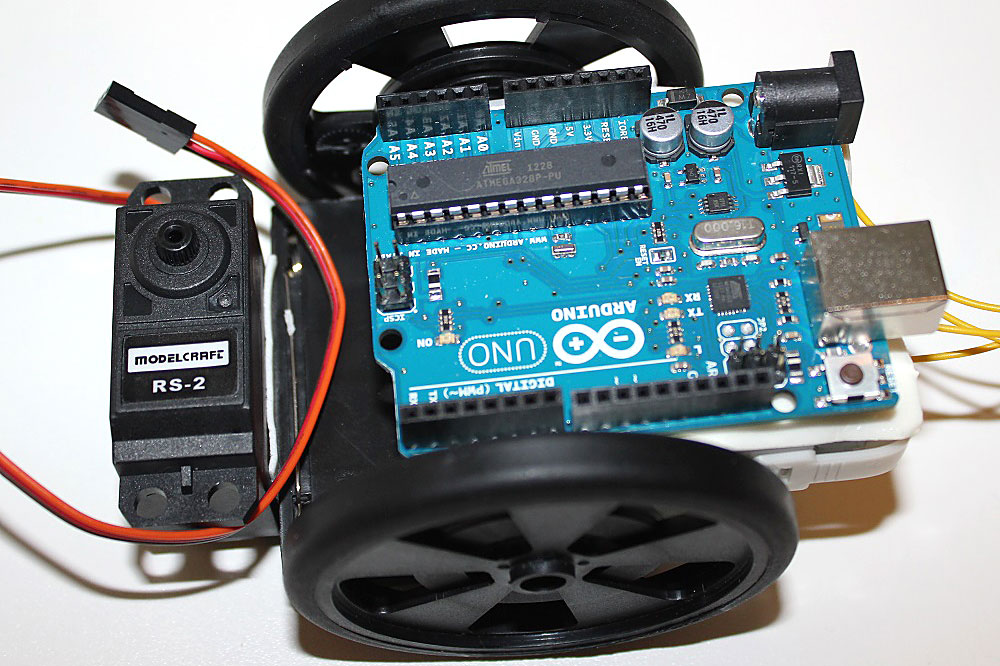
Schritt 8
Befestige den Arduino oben auf den beiden Motoren und lass etwas Abstand zwischen dem Servo und Arduino.
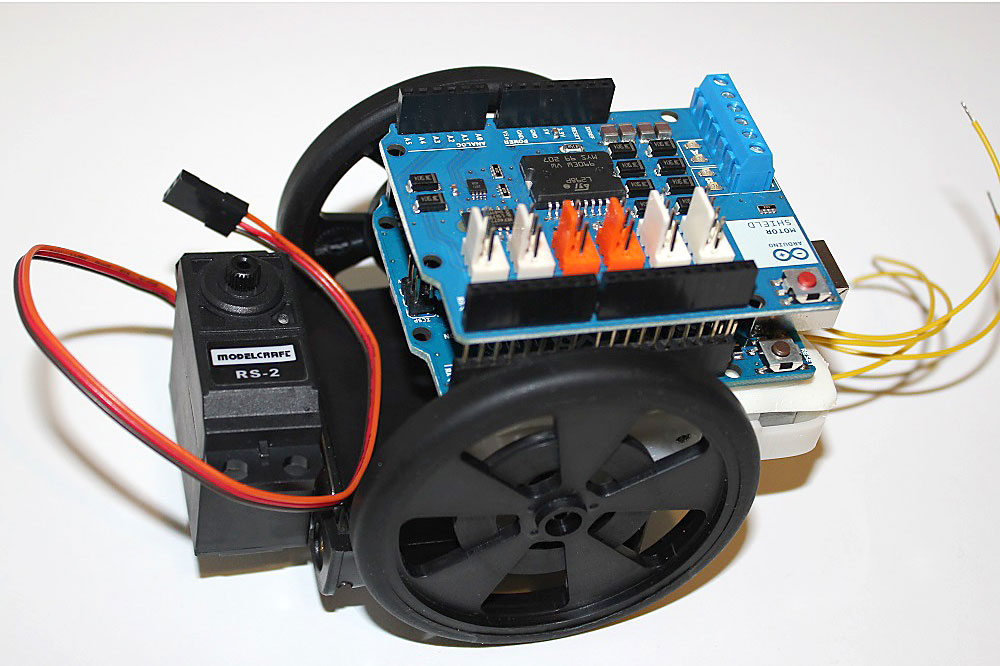
Schritt 9
Auf den Arduino-Board wird nun das Motor Shield aufgesteckt. Achte dabei darauf, dass die Stiftleisten des Motor Shields sich nicht verbiegen und die Buchsenleisten richtig getroffen werden. Lass dir dabei etwas Zeit ?
Schritt 10
Nun kommen wir zu den Anschlüssen des Servo Motors. Wenn du es dir anschaust, wirst du feststellen, dass man etwas von den Anschlüssen sieht. Damit diese Kontakte nicht raus rutschen, hat der Servo-Anschluss drei kleine Klappen.
Schritt 11
Bei diesem Schritt kann man zwischen zwei Varianten wählen.
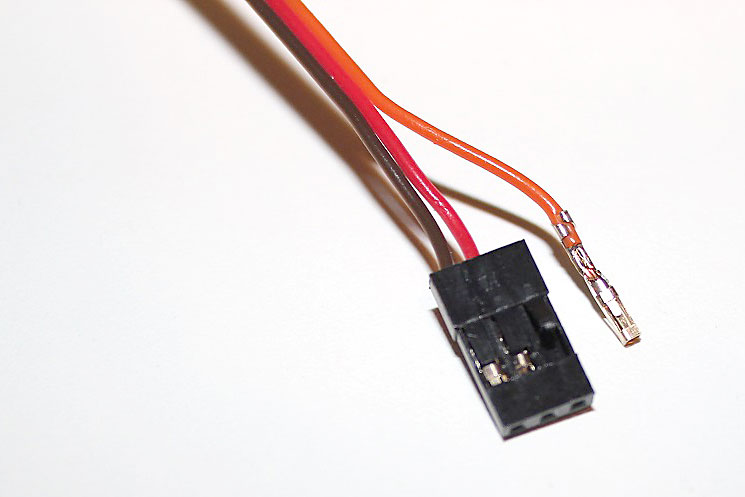
Variante 1: Biege die Klappen mit dem Schlitz-Schraubendreher nach oben und ziehe die Leitungen mit der Kontakthülse raus Siehe Bild). Lass dir dabei etwas Zeit – wir haben es wirklich nicht eilig
Variante 2: Man zieht nur die rote und die orangene Leitungen raus und vertauscht sie. In den Bildern wird nur die Variante 1 gezeigt. Es spielt keine Rolle ob du dich für 1 oder 2 entscheidest, denn die Funktion bleibt trotzdem gleich
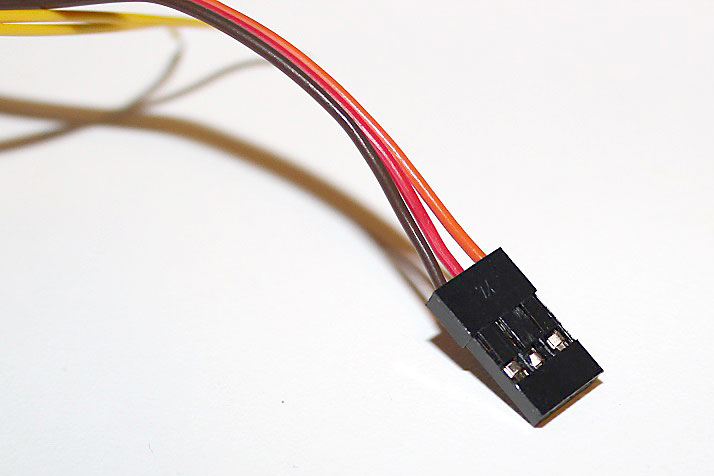
Schritt 12
Wenn du alle drei Leitungen raus gezogen hast, sollte es ungefähr so aussehen (siehe Bild)
Schritt 13
Schneide jetzt drei 1,5cm kurze Stücke von dem Schrumpfschlauch ab und setze sie auf die Anschlusshülsen der Servo-Anschlussleitungen (was für ein Wort, oder?) auf.
Schritt 14
Nun werden die Schrumpfschläuche mit dem Feuerzeug erwärmt. Bring bitte nicht die Leitungen zum Schmelzen ? Zwei bis drei Sekunden reichen vollkommen aus.
Schritt 15
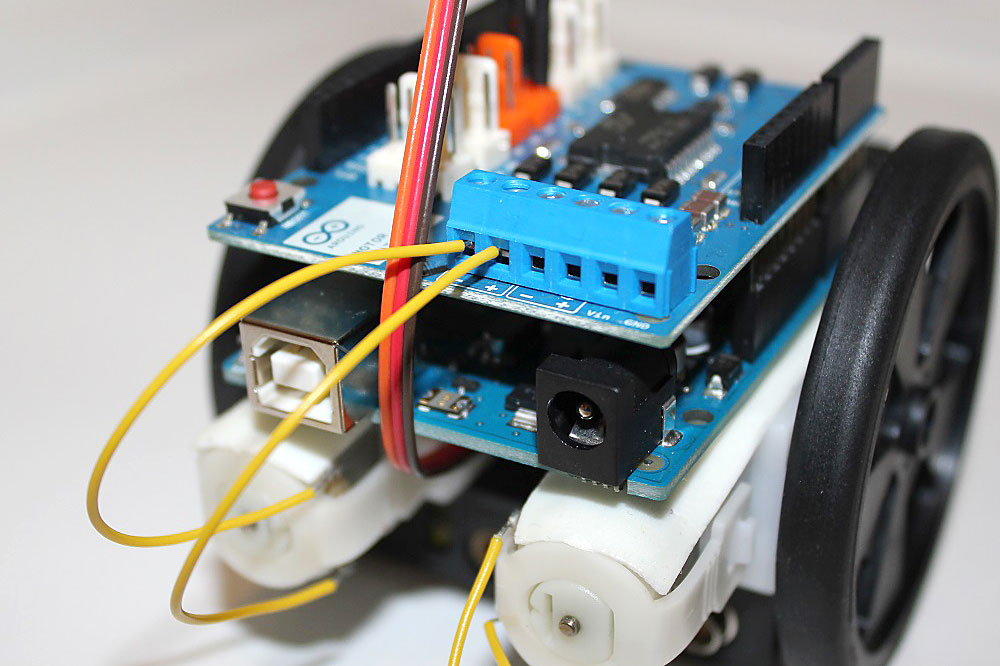
Der Servo wird an den orangenen Steckern OUT ~5 auf dem Motor Shield angeschlossen. Wenn man den halbfertigen Roboter mit dem Servo zu sich hält, wird an den Linken Pin die Braune (Minus) Leitung, an den mittleren Pin die orangene (Signal) und an den rechten Pin die rote (Plus) Leitung angeschlossen. Bitte achte darauf, dass es richtig angeschlossen ist, sonst funktioniert der Servo nicht ?
Schritt 16
Nun werden die Motoren angeschlossen. Wir fangen mit dem linken Motor an. Stecke die obere Leitung des linken Motors in die ganz linke (Minus) Schraubklemme rein und schraube sie zu. Die untere Leitung des Motors wird an die zweite Klemme von links (Plus) angeschraubt. Bitte wende beim Zusammenschrauben keine Gewalt an.
Schritt 17
Jetzt ist der rechte Motor an der Reihe. Hier gilt dasselbe – also obere Leitung an Minus-Klemme (dritte von links) und die untere Leitung an Plus (vierte von links).
Schritt 18
Nun kommt wieder mein Lieblingswerkzeug ins Spiel, nämlich ein Lötkolben ? Nimm dir drei Jumper Wires und zwar möglichst in denselben Farben wie die Anschlussdrähte des IR-Distanzmessers. Manchmal werden die Jumper Wires in zufälligen Farben geliefert. Das macht aber nichts. Wichtig ist, dass du weißt welche Leitungen des Jumper Wires mit welchen Leitungen des Distanzmessers verbunden sind. Schneide alle drei Jumper Wires in der Mitte durch.
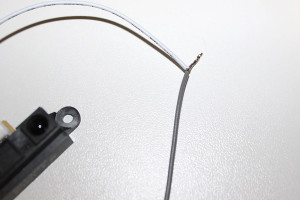
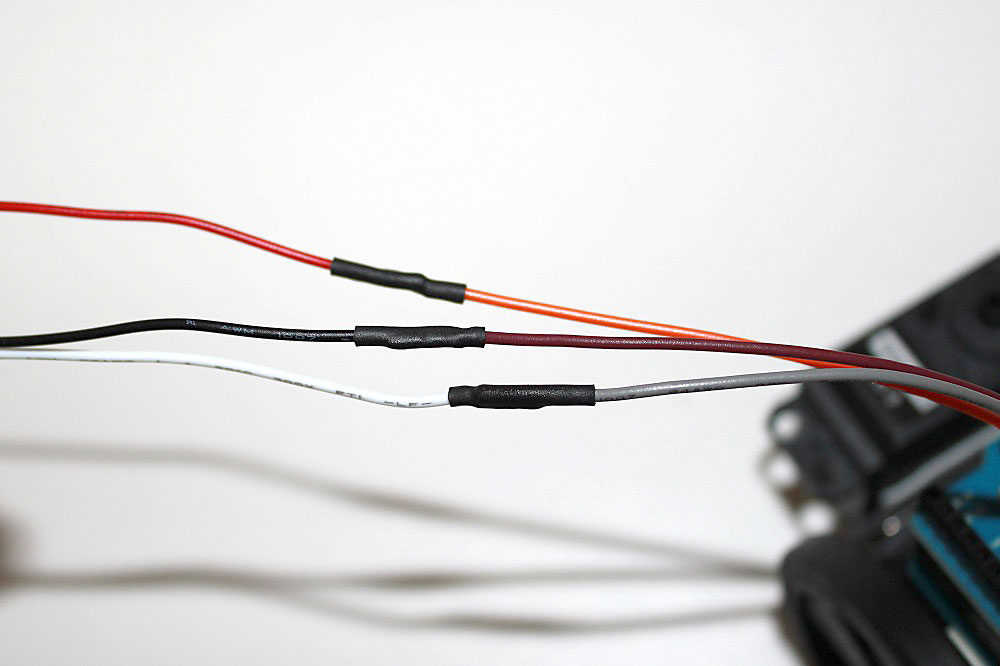
Die Leitungen vom IR-Sensor und Jumper Wires (ich weiß, ich wiederhole das Wort viel zu oft) werden an den Enden ca. 1,5cm abisoliert und die Schrumpfschläuche (ca. 2cm) werden aufgesetzt (siehe Bild).
Ein Jumper Wire und eine Leitung des Sensors miteinander verdrillen und anschließend miteinander verlöten.
Schritt 19
Über jede dieser Lötstellen wird nun der Schrumpfschlauch drüber gezogen. Die verlöteten Spitzen, die im Weg stehen, werden einfach parallel zu Leitungen gebogen. Hier auch die Schrumpfschläuche mit dem Feuerzeug erwärmen, damit sie fest sitzen.
Schritt 20
Da ich keine Jumper Wires in passender Farbe hatte, muss ich mir merken (und du vielleicht auch), welche Sensorleitung mit welcher Anschlussleitung verbunden wurde. Bei mir geht Rot auf Orange, Schwarz auf Braun, Weiß auf Grau.
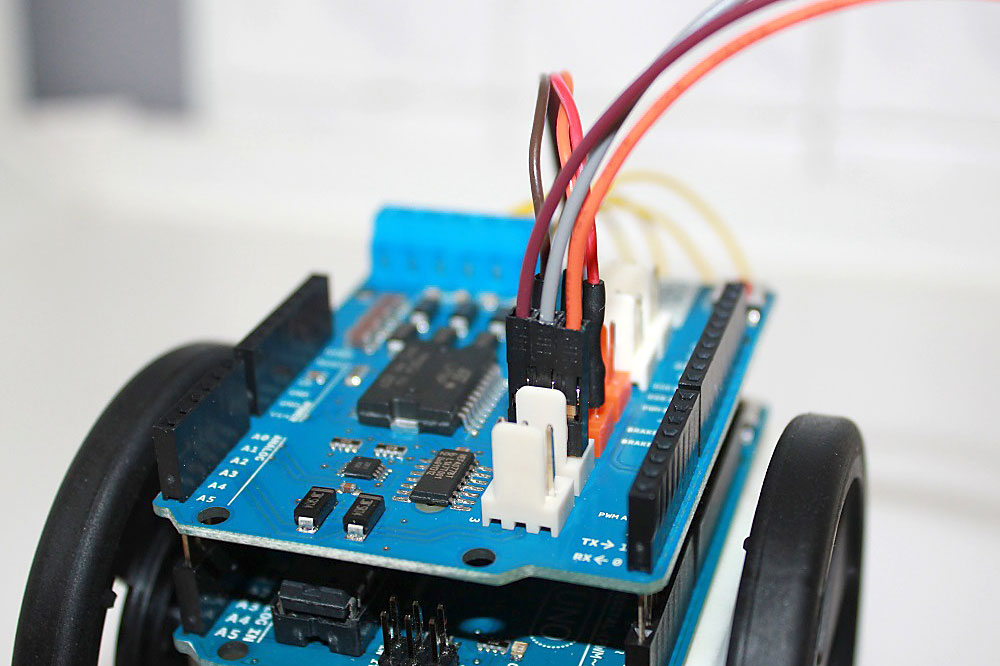
Schritt 21
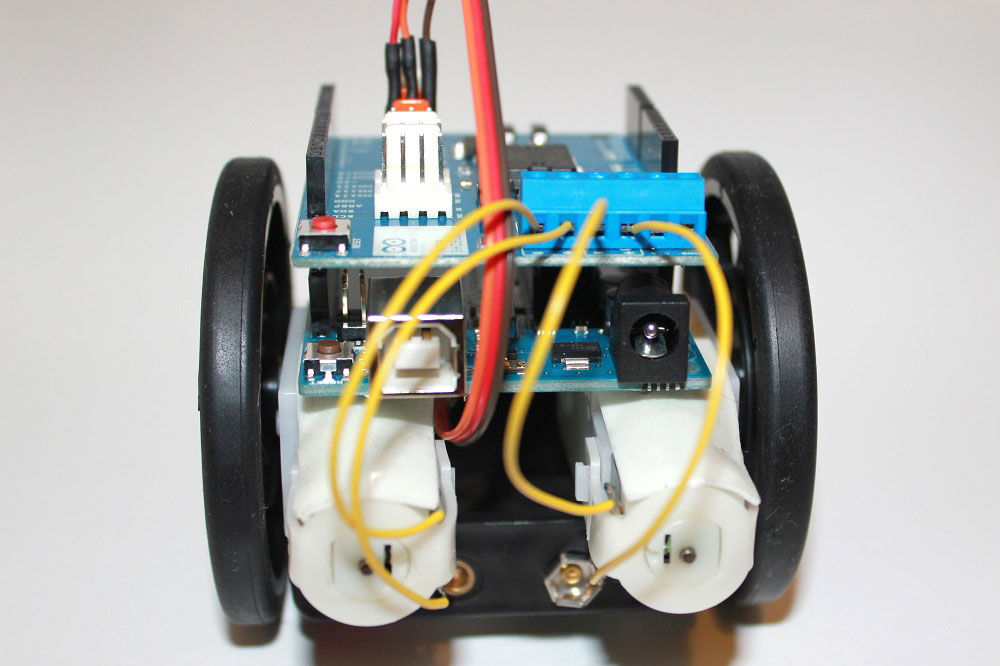
Als nächstes wird der vorbereitete IR-Distanzmesser an den weißen IN 2 Pin wie im Bild angeschlossen. Die Pinbelegung der drei Anschlusspins ist zum Servo identisch. Wenn man den Roboter mit dem Servo zu sich hält, ist links die Minusleitung (schwarz beim Sensor), mittig die Signalleitung (weiß beim Sensor) und rechts die Plusleitung (Plus beim Sensor).
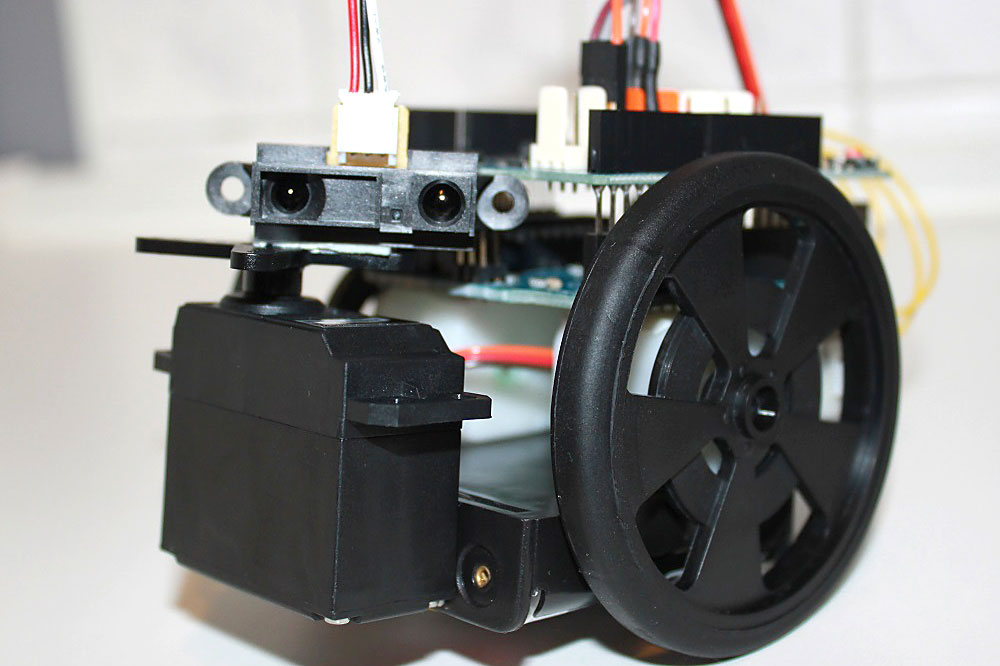
Schritt 22
Und nun wird der Infrarotsensor mit Hilfe des doppelseitigen Klebebands am Servo befestigt.
uuuund…… !!!
TADAAAAA !!! Den mechanischen Aufbau hast du fertig.
Die Programmierung des Arduino Roboters
Das Programm für diesen Roboter, wurde von Bekannten von mir geschrieben. Mein Code hat nicht so gut funktioniert, deswegen veröffentliche ich hier seinen ?
/*****************************************************************************/
/*** Datei: WMRprogrammcode.ino ***/
/*** Version: 1.0 ***/
/*** Datum: 15.02.2013 ***/
/*** ***/
/*** ***/
/*** Weiter-Entwicklung erwünscht! Aber bitte erzählt uns davon... ;-) ***/
/*** ***/
/*** Das Programm wurde geschrieben von Florian H. ***/
/*****************************************************************************/
// Nützliche Funktionen für die Servo Ansteuerung kommen von hier:
#include <Servo.h>
// Welcher Pin hat welche Funktion???
// Funktion Pin Beschreibung
#define IR_SENSOR 2 // Der Sharp IR Sesor ist an Pin 2
#define DIR_B 13 // Richtung B
#define DIR_A 12 // Richtung A
#define PWM_B 11 // Geschwindigkeit B
#define BRAKE_A 9 // Bremse A
#define BRAKE_B 8 // Bremse B
#define PWM_A 3 // Geschwindigkeit A
#define SERVO 5 // Servo wird an Pin 5 angesteuert
// Nützliche Einstellungen:
#define FULL_SPEED 128 // Vollgas ist 255, höher geht nicht. Erstmal nur die halbe Geschwindigkeit...
#define TURN_SPEED 255 // schnell Drehen
#define LEFT LOW // Links drehen bei LOW
#define RIGHT HIGH // ... und Rechts bei HIGH
#define CLOSEST_DISTANCE 350 // Bei diesem Wert am IR Sensor soll der Roboter anhalten --> Ist der Wert KLEINER hält der Roboter FRÜHER an
#define SERVO_RIGHT 55 // Mit welchem Winkel stößt der Sensor auf dem Servo Rechts an?
#define SERVO_LEFT 125 // Das gleiche mit Links
Servo SensorServo; // Mit diesem Element wird der Servo gesteuert
// An welcher Servo Position ist die Distanz zur Gefahr am geringsten?
int SeekingPositionWithClosestDanger()
{
// Erst mal anhalten
digitalWrite(BRAKE_A, HIGH);
digitalWrite(BRAKE_B, HIGH);
int ServoPosition;
int MinimumDistance = 0;
int MinimumServoPosition = 0;
// Von Rechts (SERVO_RIGHT = 55) nach Links (SERVO_LEFT=125) alle Servo Positionen anfahren. mit ServoPosition++ wird Wert immer um 1 erhöht
for(ServoPosition = SERVO_RIGHT;ServoPosition <= SERVO_LEFT; ServoPosition++)
{
// Servo Wert einstellen
SensorServo.write(ServoPosition);
delay(10);
// ist der aktuelle Wert näher, als der minimale Wert?
if(analogRead( IR_SENSOR ) > MinimumDistance )
{
// Ja: aktueller Wert ist neues Minimum
MinimumDistance = analogRead( IR_SENSOR );
// Außerdem merken wir uns die Servo Position
MinimumServoPosition = ServoPosition;
}
}
// Die gefundene Position wieder einstellen und Wert zurückgeben
SensorServo.write(MinimumServoPosition);
return MinimumServoPosition;
}
byte ServoPosition = 90;
boolean TurnServo = RIGHT;
// Vorwärts fahren und dabei den Sensor hin und her schwenken
void DriveForward()
{
SensorServo.write( ServoPosition );
//Beide Motoren auf Geradeaus stellen, ...
digitalWrite( DIR_A, HIGH );
digitalWrite( DIR_B, HIGH );
// ... Vollgas und ...
analogWrite( PWM_A, FULL_SPEED );
analogWrite( PWM_B, FULL_SPEED );
// ..Bremsen lösen!
digitalWrite( BRAKE_A, LOW );
digitalWrite( BRAKE_B, LOW );
// Dreht sich der Servo nach Rechts?
if( TurnServo == LEFT )
ServoPosition = ServoPosition+1; // Weiter nach Rechts drehen. d.h. Wert um 1 erhöhen
if( TurnServo == RIGHT )
ServoPosition = ServoPosition-1; // Sonst nach Links drehen, also 1 vom Wert abziehen
// Hat der Servo das Linke Ende erreicht?
if( ServoPosition > SERVO_LEFT )
TurnServo = RIGHT; // Jetzt nach Rechts drehen
if( ServoPosition < SERVO_RIGHT )
TurnServo = LEFT; // Sonst nach Links drehen...
}
// Drehen! Aber in welche Richtung??? LEFT für Links(gegen den Uhrzeiger) RIGHT für Rechts (im Uhrzeigersinn)
void Turn( boolean Direction )
{
// Bremsen
digitalWrite( BRAKE_A, HIGH );
digitalWrite( BRAKE_B, HIGH );
delay( 500 );
digitalWrite( DIR_A, Direction ); // Motor A in die "RICHTUNG" drehen
digitalWrite( DIR_B, !Direction ); // Motor B in entgegen der "RICHTUNG" drehen
// Geschwindigkeit für das Drehen einstellen
analogWrite( PWM_A, TURN_SPEED );
analogWrite( PWM_B, TURN_SPEED );
// Bremsen lösen
digitalWrite( BRAKE_A, LOW );
digitalWrite( BRAKE_B, LOW );
// Solange drehen, bis der Sensor eine 10% weitere Entfernung misst
while( ( CLOSEST_DISTANCE * 1 ) < analogRead( IR_SENSOR ) )
{
delay( 50 );
}
// Halt!
digitalWrite( BRAKE_A, HIGH );
digitalWrite( BRAKE_B, HIGH );
delay(1000);
}
// Bevor es los geht... Diese Funktion wird am Anfang genau einmal ausgeführt
void setup( )
{
//Motor A (rechts) initialisieren
pinMode( DIR_A, OUTPUT ); // Pin für Richtung Motor A als Ausgang definieren
pinMode( BRAKE_A, OUTPUT ); // Pin für Bremse Motor A als Ausgang definieren
//Motor B (links) initialisieren
pinMode( DIR_B, OUTPUT ); // Pin für Richtung Motor B als Ausgang definieren
pinMode( BRAKE_B, OUTPUT ); // Pin für Bremse Motor B als Ausgang definieren
// Beide Bremsen anziehen, HIGH = Bremsen!
digitalWrite( BRAKE_A, HIGH );
digitalWrite( BRAKE_B, HIGH );
// Servo initialiseren und auf 90° stellen
SensorServo.attach( SERVO );
SensorServo.write( 90 );
delay( 500 );
// Warten bis etwas vor dem Sensor ist
while( CLOSEST_DISTANCE > analogRead( IR_SENSOR ) )
{
// solange warten...
delay( 100 );
}
// Los geht's!!!
}
// Der eigentliche Programmablauf. Nachdem setup() fertig ist wird die Funktion loop() endlos nacheinander ausgeführt
void loop( )
{
int DangerPosition;
int Distance;
Distance = analogRead( IR_SENSOR ); // was misst der Sensor?
if(Distance > CLOSEST_DISTANCE ) // nah genug? Ist ein Hindernis nah, kommt ein großer Wert zurück. Sonst ein kleiner.
{
DangerPosition = SeekingPositionWithClosestDanger(); // Nochmal alles scannen um zu wissen, wo genau die Gefahr am nächsten ist...
// Gefahr Links?
if(DangerPosition <= 90)
{
Turn( RIGHT ); // Rechts drehen
}
// Oder doch Rechts?
if( DangerPosition > 90 )
{
Turn( LEFT ); // dann Links drehen
}
}
DriveForward(); // Immer gerade aus!!!
delay( 10 );
}
Tipps bei Problemen mit dem Arduino Roboter
Hier ist noch etwas Nachhilfe, falls der Roboter nicht das tut, was er eigentlich soll.
Frage: Mein Roboter hält immer wieder ohne Grund an, bewegt den Kopf hin und her, versucht wieder anzufahren und bleibt wieder stehen. Woran liegt das?
Antwort: Es liegt entweder an den zu schwachen Batterien oder an dem Servo. Manche Servos ziehen sehr viel Strom, sodass die Spannung kurzzeitig sehr niedrig wird. Dadurch spinnt dann die Elektronik.
Frage: Wieso fährt der Roboter bei einem Hindernis auf der linken Seite, auch nach links, obwohl er nach rechts fahren sollte?
Antwort: Das hängt so bisschen mit dem Servo und dem Programmcode zusammen. Die üblichen Servos haben einen Stellwinkel zwischen 0° und 180°. Bei manchen Servos liegen die 180° ganz links und 0° ganz rechts. Und bei manchen Servos genau umgekehrt. Im Programmcode wird abgefragt, wo der Servo sich gerade befindet, also in welche Richtung es gerade guckt. Entsprechend werden dann die Motoren so angesteuert, dass der Roboter sich vom Hindernis weg bewegt.
So wird der Controller von dem Servo manchmal rein gelegt und der “Controller” denkt, dass das Hindernis sich links befindet, obwohl das nicht stimmt. Als Lösung sollte man die Drahtpaare der Motoren gegeneinander tauschen. D.h. dort wo der rechte Motor angeschlossen war, wird der linke Motor angeschlossen und dort wo der linke Motor war, wird der rechte Motor angeschlossen.
Bezugsquellen für wichtigsten Bauteile
Arduino Board
![Arduino UNO Rev3 [A000066] - Vielseitiges Entwicklungsboard mit ATmega328P-Mikrocontroller, kompatibel mit Arduino IDE, ideal f�r Einsteiger und Elektronik...](https://www.mikrocontroller-elektronik.de/wp-content/plugins/aawp/public/image.php?url=YUhSMGNITTZMeTl0TG0xbFpHbGhMV0Z0WVhwdmJpNWpiMjB2YVcxaFoyVnpMMGt2TlRFMVVEWmhXVk5RTkV3dVgxTk1NVFl3WHk1cWNHYz18MTc3OTQyMzg4Nw=)
Letzte Aktualisierung am 19.05.2026 / * Affiliate Links
Motor Shield – Arduino kompatibel

Letzte Aktualisierung am 20.05.2026 / * Affiliate Links
Sharp Sensor GP2Y0A21YK0F
Keine Produkte gefunden.
Kleinteile







Letzte Aktualisierung am 20.05.2026 / * Affiliate Links
Geeignete Lötstation bzw. Lötkolben


Letzte Aktualisierung am 20.05.2026 / * Affiliate Links
Weitere Teile gibt es hier
- GM9 Mini Motor – über Pololu
- Räder – über Pololu
- Elektronik Kleinteile und Arduino Uno natürlich auch über Conrad* und Reichelt*
Alternative Robotik Sets bei Amazon


Letzte Aktualisierung am 20.05.2026 / * Affiliate Links
Links zum Thema
- Arduino Seite mit kostenfreier Entwicklungsumgebung
- Passende Bücher zum Thema
- Forum für Arduino Diskussionen
- Roboter Bausatz Nibo Burger
Beitrag und Fotos: Autor 5volt-junkie
Weitere Hinweise
Vor dem Aufbau bitte nachfolgende Hinweise lesen:
Das Projekt unterliegt einer CC-Lizenz - Lizenzhinweis (zum Aufklappen anklicken)
Um ihnen weitgehende Möglichkeiten zum Nutzen der Schaltung einzuräumen, wurde dieses Projekt jetzt unter die CC-Lizenz gestellt. Sie haben So die Möglichkeit die Schaltung beliebig zu verändern oder weiterzugeben. Lediglich die kommerzielle Weitergaben ist nur mit Genehmigung möglich! Genauere Hinweise finden Sie im Lizenztext.
Bei einer Veröffentlichung oder Weitergabe ist nachfolgender Text sichtbar zu übernehmen:
![]()
Projekt (Schaltung & Projektdateien) von Autor 5volt-junkie ist lizenziert unter einer Creative Commons Namensnennung - Nicht-kommerziell - Weitergabe unter gleichen Bedingungen 4.0 International Lizenz.
Über diese Lizenz hinausgehende Erlaubnisse können Sie beim Autor erhalten.
Die Homepage des Autors lautet: www.5volt-junkie.net/
Lizenziert wurde das Projekt von: Autor/User 5volt-junkie
Veröffentlicht wurde es unter www.Roboternetz.de & www.Mikrocontroller-Elektronik.de
Dieser Name und diese Webseiten sind bei der Weitergabe stets deutlich sichtbar zu nennen!
Achtung: Es kann keinerlei Garantie für die Fehlerfreiheit der Schaltung oder anderer Projektdateien übernommen werden! Der Nachbau und Betrieb geschieht auf eigene Gefahr! Jegliche Haftung für Schäden oder Verletzungen wird ausgeschlossen! Schadensersatzansprüche, gleich aus welchem Rechtsgrund, sind ausgeschlossen.
Sicherheitshinweise und Haftungsausschluss (zum Aufklappen anklicken)
Dieses Projekt dient vornehmlich für Lehrzwecke und zum Experimentieren. Für den Aufbau sollten ausreichend Elektronik Grundkenntnisse und Kenntnisse bezüglich der Sicherheit (Experimentieren mit Strom und Handhabung gängiger Werkzeuge wie Lötkolben etc.) vorhanden sein. Unter dem Menüpunkt Buchvorstellungen als auch auf der Seite RN-Wissen.de empfehle ich diesbezüglich noch interessante Literatur mit der man sich dies erarbeiten kann. Für Fragen bezüglich Elektronik und Mikrocontroller empfehle ich das Forum: Roboternetz.de
Sicherheitshinweise und Haftungsausschluss

Finde ich toll,
danke dafür, ich werde versuchen das Modell nachzubauen.
lg